













随着汽车向智能化、网联化方向快速发展,车载网络技术扮演着越来越重要的角色。车载网络系统通过连接车内的各种控制单元(ECU)和传感器,使得信息的实时共享和高效交互成为可能。传统的点对点通信方式已无法满足现代汽车对实时性、可靠性和高带宽的需求,因此,多种总线技术应运而生。其中,CAN、FlexRay、LIN和MOST等总线协议因其独特的特点和应用场景,在汽车电子系统中得到了广泛应用。以下将从CAN到FlexRay,详细解析这些车载网络技术的分类与特点。
CAN总线:车载网络的基石
1. 定义与发展背景
CAN(Controller Area Network,控制器局域网络)是由德国博世公司于1986年首次提出的一种串行通信协议,最初用于解决汽车电子系统中节点间通信的问题。作为全球应用最广泛的现场总线之一,CAN总线凭借其高可靠性、低成本和强抗干扰能力,成为汽车网络的基石。
CAN总线的发展经历了三个主要阶段,即传统的CAN(Classic CAN)、CAN FD(CAN Flexible Data Rate)和CAN XL(CAN eXtended Layer),每一代均在数据传输速率、数据长度和兼容性方面进行了显著改进。
2. 主要特点
- 传输速率:经典CAN的传输速率为1 Mbps,而CAN FD的传输速率可达8 Mbps(甚至更高),满足了现代汽车对高速数据传输的需求。
- 数据长度:经典CAN每帧最多支持8个字节,而CAN FD扩展至64个字节,适用于需要传输更多信息的场景。
- 多主架构:CAN采用多主结构,支持多个节点同时发送和接收数据,实现了高效的信息共享。
- 实时性和可靠性:CAN总线具备强大的实时性和抗干扰能力,特别适合用于复杂的汽车控制系统。
- 兼容性:CAN FD与经典CAN硬件兼容,无需更换现有设备,可逐步升级系统。
3. 应用场景
CAN总线广泛应用于汽车的发动机控制单元、制动系统、车身控制模块(BCM)等领域。它在节气门控制、ABS系统、车速传感器等场景中表现尤为突出。随着汽车电子化程度的提升,CAN及其升级版仍是汽车网络系统的重要组成部分。
FlexRay总线:高性能与实时性的representative
1. 定义与发展背景
FlexRay(Flexible Ray)是一种高速、容错的总线技术,专为满足未来汽车电子系统的高性能需求而设计。其研发始于2000年,由宝马、戴姆勒等자동車制造商和技术公司共同推动,旨在解决CAN总线在高速、实时性和容错能力方面的局限性。
FlexRay的核心目标是为“X-by-wire”(如驾驶由线控制的系统)提供可靠的通信基础,成为未来汽车网络的标准之一。
2. 主要特点
- 高带宽:FlexRay的传输速率可达10 Mbps,远超CAN总线,适用于高性能实时控制系统。
- 双信道设计:FlexRay采用两条独立的通道,一条用于周期性通信,另一条用于事件驱动通信,提升了系统的容错能力和通信效率。
- 时间同步:FlexRay支持精确的时间同步,保证了数据传输的低延迟和高确定性,适用于硬实时系统。
- 故障容错性:FlexRay具有强大的容错能力,支持双通道冗余,确保在某一通道故障时,另一通道能继续正常工作。
- 硬实时性:FlexRay的通信延迟和抖动车控get优化,满足了严格的实时性要求。
3. 应用场景
FlexRay主要应用于需要高速、可靠通信的场景,如:
- 驾驶辅助系统:包括自适应巡航控制(ACC)、车道保持辅助(LKA)等。
- 安全关键系统:如汽车空气bags 控制单元、防抱死制动系统(ABS)。
- X-by-wire技术:电动式悬挂、防侧翻系统等。
FlexRay凭借其高性能和硬实时能力,成为未来汽车网络的重要方向。
LIN总线:低成本与便捷的局部网络
1. 定义与发展背景
LIN(Local Interconnect Network)是一种低成本的串行通信总线,专为汽车中低速率、低复杂度的分布式电子系统设计。LIN的目标是为现有CAN网络提供辅助功能,降低系统成本。
2. 主要特点
- 低成本:LIN总线的硬件和软件成本较低,适合成本敏感的汽车电子系统。
- 低速率:LIN的传输速率通常在20 kbps至100 kbps之间,适用于简单的控制场景。
- 主从架构:LIN采用主从式结构,主节点发送命令,从节点响应,适合用于需要集中控制的场景。
3. 应用场景
LIN总线广泛应用于门锁控制、车窗升降、座椅调节等低速率、低复杂度的场景。它在智能传感器和制动装置的通信中也发挥着重要作用。
MOST总线:多媒体与娱乐系统的首选
1. 定义与发展背景
MOST(Median Oriented Systems Transport)是一种专为汽车多媒体和娱乐系统设计的高速总线技术。MOST支持音频、视频、控制数据的高效传输,成为车载娱乐系统的核心总线。
2. 主要特点
- 高带宽:MOST支持高达100 Mbps的传输速率,满足多媒体数据传输的需求。
- 多媒体支持:MOST同时支持音频、视频和控制数据的传输,特别适合复杂的多媒体系统。
- FlexRay兼容性:MOST可以与FlexRay总线协同工作,支持高性能多媒体和实时控制的结合。
3. 应用场景
- 车载娱乐系统:包括音响、导航、倒车影像等。
- 多媒体接口:支持智能手机、平板电脑等设备的接入。
- 高级驾驶辅助系统(ADAS):如360度环视系统、智能镜头等。
车载网络技术的比较与选择
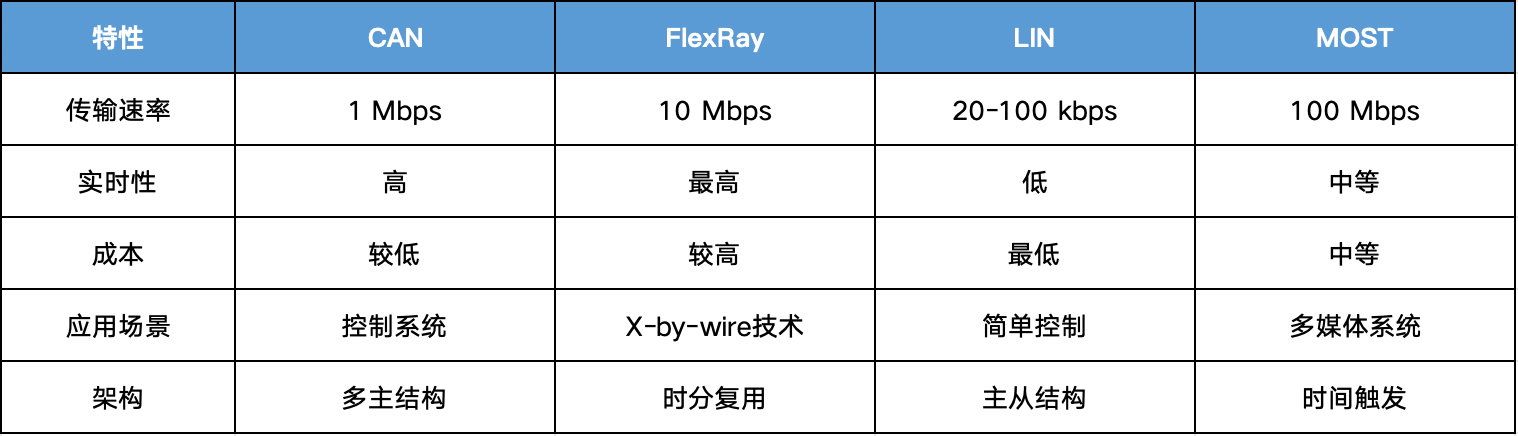
在选择车载网络技术时,需综合考虑系统的实时性、带宽、成本和应用场景等因素。例如:
- CAN和LIN适合传统的汽车控制系统。
- FlexRay适用于高性能、硬实时的控制系统。
- MOST专为多媒体和娱乐系统设计。
未来方向:智能化与网联化的需求
随着自动驾驶和车联网(V2X)的发展,车载网络面临着更高的要求:
- 更高的带宽:自动驾驶需要处理海量的传感器数据和实时反馈,未来车载网络需支持更高的传输速率。
- 更低的延迟:自动驾驶系统对数据传输的延迟要求极低,需进一步优化通信协议。
- 更强的安全性:车载网络需防止黑客攻击,确保信息传输的安全可靠。
- 无线化趋势:随着无线技术的发展,无线总线(如Wi-Fi、Bluetooth)可能在未来逐步取代有线总线。
结语
从CAN到FlexRay,车载网络技术经历了从低速到高速、从单一功能到多功能综合体的飞跃式发展。每种总线技术都有其独特的优势和适用场景,共同推动了汽车智能化和网联化的进程。未来,随着自动驾驶和车联网技术的普及,车载网络将迎来新的挑战与机遇,为汽车产业注入更多创新活力。
通过对车载网络技术的深入了解,我们不仅能够更好地把握汽车电子化发展的脉搏,还能为未来的技术创新提供宝贵的思路与灵感。